Projects
SeDriCa | UMIC
The Mahindra Rise Challenge envisages developing a working unit of a ‘driverless car’ for Indian conditions. Applicants will be required to develop and demonstrate such a car first for ‘controlled environments’ such as campuses, followed by an intra-city situation. Applicants can assume that the vehicle will drive on paved roads. Innovation Cell has received a Mahindra E2o Car for being in the top 11 amongst 289 teams.
Computer Vision Head (April. ‘19 - May ‘20)
As the head of computer vision subdivision, I am leading a team of sophomores and thirdies working towards implementing road detection, object detection, object classification and lane segementation.
Computer Vision Researcher (Nov. ‘18 - March ‘19)
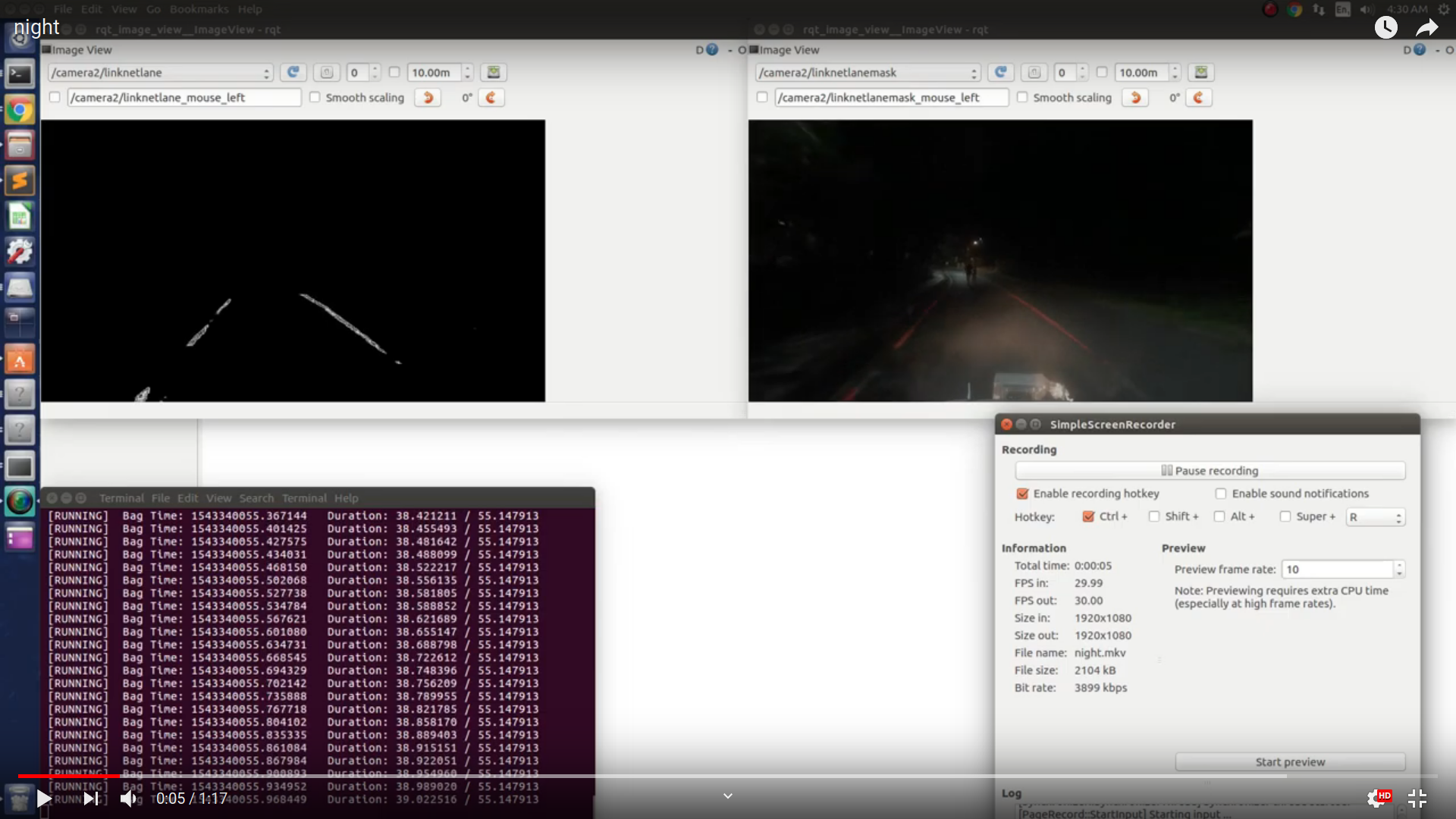
I am currently working on implementing various convolutional neural network architectures for lane detection, which is a critical aspect of achieving level 4 autonomy. I have implemented d-linknet and a multi encoder-decoder based architecture for training on the pixel-level annotated lane dataset (Apollo and Mapillary). Currently, we are working on improving the datasets and models to achieve the state of the art lane detection which can be deployed on the Indian roads, which have issues of broken or faint lane markings, thus, making the task of lane detection difficult.
In the video below, you can see lane detection performed a poorly marked road in low light conditions:
AUV IIT Bombay
AUV-IITB comprises of highly enthusiastic and hardworking technocrats ranging from bright-eyed first-year students to driven senior undergraduates and tech-experienced post-graduates spanning various branches of engineering like Mechanical, Electrical, Software, Aerospace, Material Science and Civil at Indian Institute of Technology Bombay. The team works towards participating at AUVSI Robosub Competition, which is held annually in July at San Diego, California. The competition is a platform for students to display their skills in underwater robotics and build a connection with industries working along similar verticals. The competition demands to design and manufacturing of an autonomous underwater vehicle that can perform predefined tasks. This draws upon the expertise of the areas of engineering provided by the multifaceted team. Currently, we are a 22 membered team developing cutting edge technology for Autonomous Underwater Vehicles (AUV). The development of an AUV is a year-long process involving design, manufacturing, assembly, testing, integration and competition preparation. To accelerate the development of MATSYA our team is structured into three subdivisions viz Mechanical, Electrical and Software. Every year the team puts in 30,000 working hours for the development and integration of our AUV MATSYA.
Chief Engineer (Aug. ‘16 - Jan. ‘18)
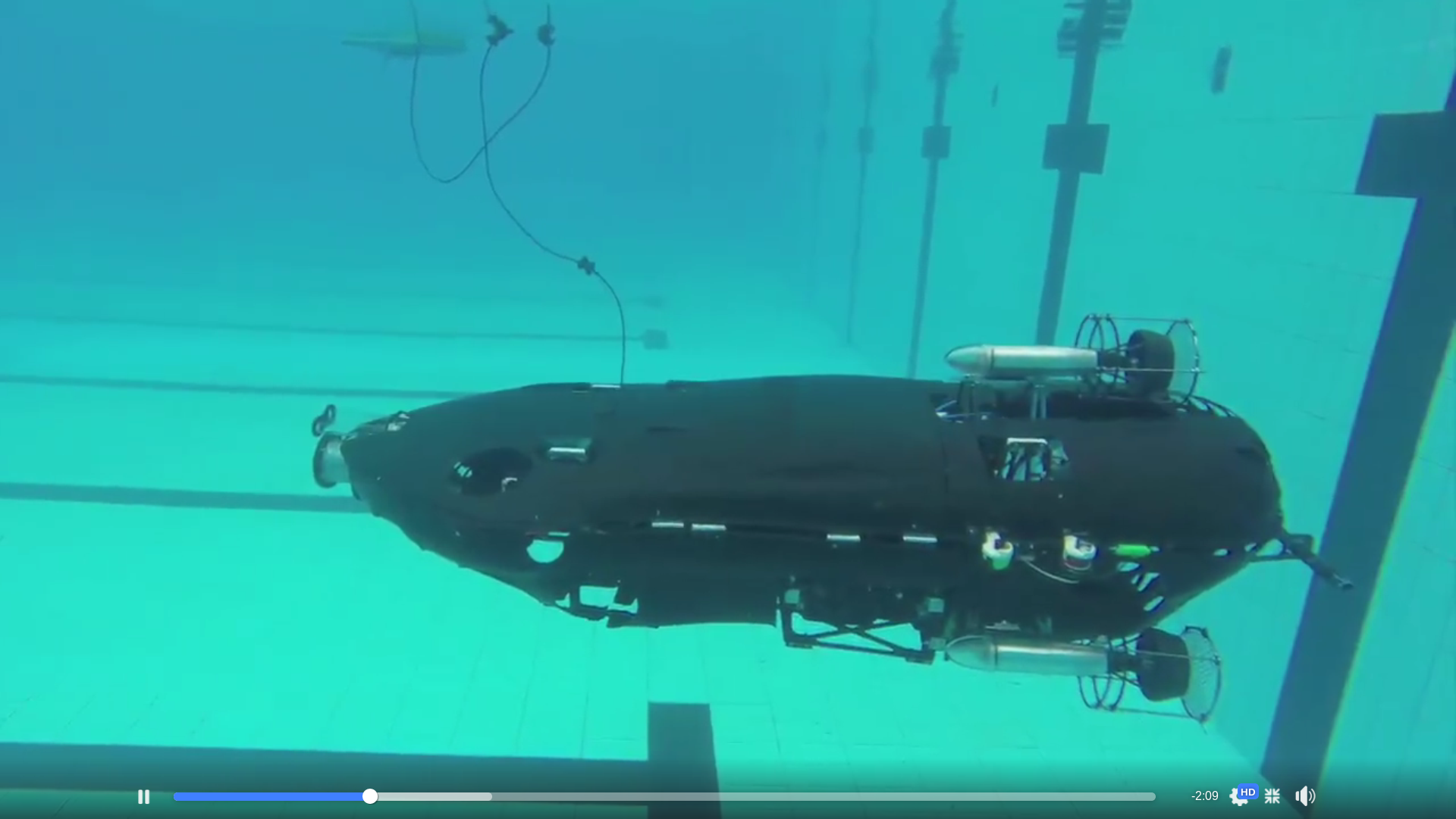
I was involved in the analysing the structures, rigorous testing and prototyping the parts of the vehicle. I have represented the team in various tech expositions. I was involved in the development of state of the art 2-D arm which could perform multiple actions. I improvised the designs of the torpedos for better range and designed a testing mechanism for the same.
In the video below you can the Matsya 5 in action and the know more about the improvements over the previous version:
In the video below you can find me explaining about Matsya 4:
